интро 1:
типы измерительных преобразователей (датчиков - не всегда верно, но все так их называют), используемых в технологических процессах, классифицируются по множеству критериев. однако, все они четко подразделяются на два типа: т.н. "аналоговые" и "дискретные" - это классификация по типу выходного сигнала.
аналоговые - те, которые могут на выходе дать непрерывную величину (вольты, амперы, омы, генри, герцы и т.д и т.п.), зависящую (в идеале - линейно, в жизни - с искажениями) от входной величины (градусы, бары, м3 в час, моли на литр, кг и т.д. и т.п.)
дискретные - те, которые имеют два выраженных устойчивых состояния на выходе, зависящих от входной величины. тут становится уместно употреблять всяческие грязные ругательства вроде
гистерезиса =)
аналоговые датчики могут иметь аналоговый и дискретный выходы одновременно, и они будут обязательно независимыми. это касается, в основном, промышленного оборудования...
интро 2:
подавляющее большинство измерительных преобразователей (датчиков) общего назначения имеют стандартные выходные сигналы (0-10 В, 0(4)-20 мА, "сухой контакт" и т.д.). эта унификация преследует цель согласовать любой датчик с любым измерительным каналом (в пределах разумного). некоторые датчики, изготавливаемые для уникальных, узконаправленных применений, не оборудуются согласованием выхода - измерительный канал работает с преобразователем физической величины напрямую.
интро 3:
систему автоматического регулирования принято строить по классической схеме (ооочень упрощенно) "аналоговый датчик -> думательное устройство -> пропорциональный исполнительный механизм"
но возможны также варианты, например "аналоговый датчик -> думательное устройство -> дискретный исполнительный механизм", или "дискретный датчик -> думательное устройство ->
пропорциональный исполнительный механизм", или "дискретный датчик -> думательное устройство -> дискретный исполнительный механизм".
все, кроме первого, применяются не от хорошей жизни...
так вот!
"думательное устройство" в машине есть - ECU. и задача его, в том числе, поддерживать оптимальное соотношение топлива и воздуха. как можно оптимизировать смесь? не делать впрыск нельзя - очевидно. но можно регулировать его время. так у нас появляется "пропорциональный исполнительный механизм".
работать только от MAF или MAP можно, но в этом случае ECU не будет знать, насколько именно эффективно была отрегулирована смесь. а что нужно, чтобы это узнать? да, надо посмотреть на выход! т.е., нужен датчик. условия работы у нашего датчика, прямо скажем, далеко не тепличные. и задача у него сложная - ловить остаточный кислород. естественно будет предположить, что основой преобразования должна быть некая электрохимическая система.
и вот, наконец, поставлена задача: все моторы должен быть экологичными! значит, надо делать датчики. массово. и недорого. так появился датчик кислорода в том виде, в каком мы привыкли к
нему. датчик наш - дискретней некуда... ибо имеет два устойчивых состояния: "есть кислород" и "нет кислорода". рабочая характеристика, структурные особенности и прочие моменты указывают
на родство нашего датчика к потенциометрическим методам анализа. выход - нестандартный, ибо незачем. его никуда больше не будут ставить, кроме как на автомобили.
так и повелось: датчик говорит "есть кислород" -> ECU увеличивает время впрыска -> топлива поступает больше, чем надо -> остаточный кислород исчезает -> датчик говорит "нет кислорода" -> ECU уменьшает время впрыска -> топлива поступает меньше, чем надо -> остаточный кислород появляется -> датчик говорит "есть кислород" и так далее по циклу.
в результате мы видим тот самый график: быстрые прыжки потенциала и плато между ними. а мотор работает на двух режимах: бедная смесь и богатая смесь. но, так как эти режимы очень
быстро сменяют друг друга, то можно утверждать, что мотор работает на оптимуме смеси: лямбда = 1.
кста, неверно говорить, что наш датчик "дает синусоиду" - нету там никаких синусоидов, и быть не может. появление синусоиды - это верный знак отравления электрохимической системы, это
уже беда. датчик, дающий синусоиду, подлежит немедленной замене. наш ECU не обучен воспринимать синусоиду.
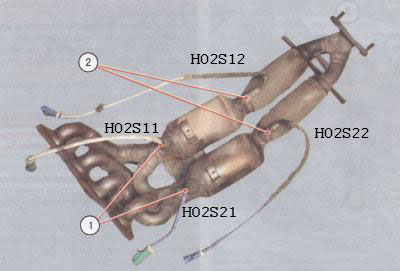
по идее, нижний датчик кислорода, построенный на том же элементе, что и верхний, может его заменить. и, опять же, по идее, если с верхнего датчика ECU ожидает получать колебания как
ответ на воздействия на время впрыска, то с нижнего - наоборот, никаких колебаний! нижний всегда должен давать ровный сигнал "мало кислорода", т.к. весь остаточный кислород должен
расходоваться на дожиг всего и вся на каталитическом нейтрализаторе. и если ECU видит, что нижний датчик начал давать сигналы, схожие с верхним, то катализатор явно потерял активность - вот вам и диагностика катализатора! беда только в том, что нижний датчик, в силу специфики своей работы, может умереть тихо, незаметно для ECU. а это чревато крупными наприятностями.
что же мы получили? всем всё нравится: мотор работает среднестатистически оптимально, датчик бдит за качеством смесеобразования, ECU корректирует время впрыска, экологи довольны, автовладелец доволен. чего еще надо?..
надо! основной недостаток нашей чудесной системы - дискретность датчика кислорода. у него, как и у любого дискретного датчика, должен быть гистерезис. иначе будет дребезг и проистекающие от этого неприятности. и мы (т.е. ECU) не знаем, СКОЛЬКО ИМЕННО КИСЛОРОДА ЕСТЬ В ВЫХЛОПЕ? знаем, что его сейчас много, а сейчас мало. а вот сколько - не знаем.
а почему? а потому, что такой датчик. а мы хотим, чтобы смесь была оптимальной всегда!!! вот хотим, и всё тут!!! значит, нам нужен другой датчик. и этот датчик должен быть уже аналоговый... но уж больно хорошая получилась электрохимическая система у дискретного датчика... давайте попробуем ее немного модифицировать. что нам нужно сделать с дискретным датчиком, чтобы получить из него аналоговый? да, именно так: надо его таким сделать, чтобы его переходная характеристика была бы не такой крутой, стала бы "шире", стала бы линейной (или, на крайний случай, предсказуемой нелинейной) в интересующем нас диапазоне концентраций кислорода. так родились датчики концентрации остаточного кислорода, которые называют "широкополосными" - аналоговые датчики. и система управления качеством смеси стала близка к идеалу - нет больше колебаний "есть кислород" и "нет кислорода". ECU точно знает, сколько его. и точно определяет необходимое время впрыска. вот уж классические регуляторы типа feedback человечество настраивать научилось очень даже.
x


 6 years
6 years












 ; AlibA,
; AlibA, 
 - на английском
- на английском  .
.




 Dark mode
Dark mode